
About Me
My research passions lie in the realm of robotics, embedded systems, satellite technology and control. I am currently working in precision agriculture, applying robotics for crop disease assessments.
Some more works that I love to engage in: Creating the framework of the robot, developing its circuitry, integrating sensors and actuators, and formulating control algorithms for targeted functions. Monitoring the performance of the controller, sensor responsiveness, power setup, and the robot's Perception through Simultaneous Localization and Mapping (SLAM) techniques.
Publications
These are my publications, exploring domains such as robotics, control systems, machine vision and innovative engineering applications.
Paneru, S., Yadav, S.,Devkota, R., Baskota, G., Guragai, M. K., Dhakal, O. P., Neupane P., & Shrestha, A. (2023, September). Mapping and Localization of Mobile Robot with Monocular Camera Using VSLAM. In Int. J. Adv. Engr. 2023, 6(2), pp.24-36.
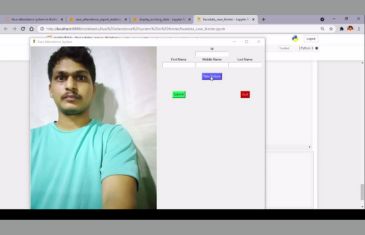
Robot mapping and localization are essential components of mobile robotics, providing the foundation for path planning, navigation, and AR/VR applications. This project aims on utilizing a monocular camera as the sole sensor to construct a comprehensive map of an environment and achieve precise robot localization within it. Visual Simultaneous Localization and Mapping (VSLAM) techniques, leveraging affordable cameras, are employed to address challenges posed by dynamic environments, varying lighting conditions, and texture-less surfaces. The project aims to implement the Stella VSLAM algorithm for robust feature extraction, enabling accurate mapping and localization capabilities. For efficient communication and coordination among parallel processes, as well as seamless interaction between the robot and a PC, the project leverages the Robot Operating System (ROS). ROS serves as a reliable communication framework, optimizing inter-process communication and enhancing overall system performance. By offloading computationally intensive tasks to the PC, the project maximizes the robot's execution capabilities while receiving commands from the PC. The integration of the Stella VSLAM algorithm and ROS contributes to the development of a reliable and accurate mapping and localization system for various mobile robotics applications.
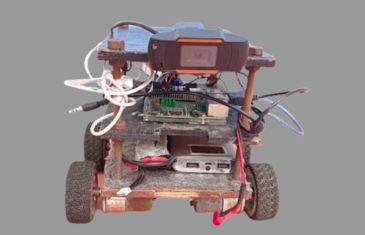
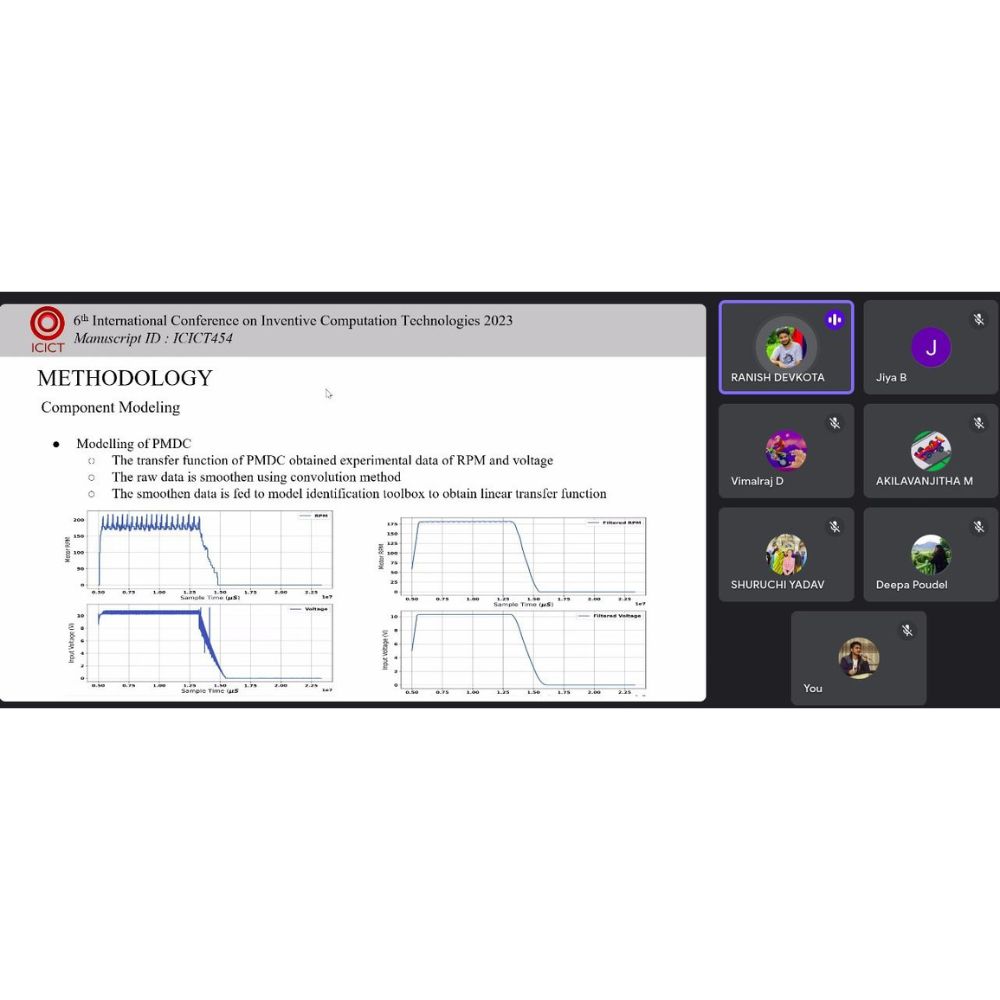
Baskota, G., Devkota, R., Paneru, S., Yadav, S., Neupane, D., & Dhakal, O. P. (2023, April). Analytical and Experimental Approach for Modeling, Simulation and Validation of Two-Wheeled Self-Balancing Robot. In 2023 International Conference on Inventive Computation Technologies (ICICT) (pp. 1313-1320). IEEE.
Two-Wheeled Self-Balancing Robot (TWSBR) has many applications and is an important research topic in robotics and control engineering. The principle behind the operation of a TWSBR is an inverted pendulum. The mathematical modelling of the TWSBR is still challenging as it includes non linear components to operate. This study aims the analysis of a two-wheeled, micro-controller based fabricated TWSBR. The linear mathematical model of each of the components of TWSBR has been obtained. Some of the components has been modelled using experimental model identification method while some are represented analytical approximations. A PID controller has been used to balance the TWSBR in upright position. The overall system has been simulated in MATLAB/SIMULINK. The result from the simulation is compared with real time hardware setup of the system to validate the mathematical model and stability of the TWSBR. The investigation has shown adequate accuracy in the models of components used in TWSBR. Moreover, the simulated results shows similar behaviour to that of hardware realization of the robot. This study may help on several research related to system identification, mathematical modeling and controller design of TWSBR.
Projects
I have accomplished many projects till date. But, the counted only those which that are done by targeting to learn and develop skills for research/professional journey. These projects have aligned with different areas of the robotics field.
Some Projects



Experiences
My latest experiences are listed below:
Orion Space
Research and Development Engineer
- Embedded designer and programmer in commercial Pico satellite.
- Antenna tuning and installation, GFSK and CW uplink and downlink implementations.
Jan, 2025 - May - 2025
Yarsa Tech Pvt. Ltd.
Electronics Engineer
- Research and manufacture consumer electronics systems in Nepal.
Apr, 2024 - Jan - 2026
Orion Space Pvt. Ltd.
Research and Development Engineer
- Developing the embedded systems and firmware for payload and satellite systems.
- Designing, Testing and Analyzing the electronics components/circuits for low power consumption devices.
- Developing the nano/pico Satellites for educational & commercial purposes.
May, 2023 - Apr - 2024
Electronics and Communication Engineering Student Society (EXCESS)
President
- Lead the student society to enhance the technical skills of students.
- Organized several events to showcase their skill sets.
May, 2022 - May - 2023
Robotics Association of Nepal
Member
- Enhance the ability to do robotics and automation work within the team.
- Jump to the opportunities obtained as a robotics enthusiast.
- Involved in many technological works that lead to the development of robotics industry in Nepal.
Sep, 2020 - May - 2025
Robotics Club of Eastern Regional Campus
Executive Member
- Involved in different types of research and projects including CNC machines, Robotics Arm, SLAM using LiDAR, Smart Curtain mechanisms, Drones, etc.
Sep, 2020 - May - 2022
Gallery












Contact
You can leave me a message here!
Location:
Winnipeg, MB
Email:
info (at) gokarnabaskota.com.np
Call:
!-- email me --!